This page describes some aspects of my research activites. It is a bit outdated but I try not to let it die.
Research overview
 |
The evolution of robots in complex dynamic environments is a difficult problem because it requires solving the safety/optimality trade-off without falling into the trap of conservatism – the robot does not move – or overconfidence – the robot regularly damages its environment. This very general scientific issue is the core of my research activity and I approach it through the prism of control.
It also raises research questions that go beyond the boundaries of Robotics: system dynamics and modelling, but also numerical optimization, biomechanics and human movement, or evolutionary and machine learning approaches applied to robotics. This is all the more true if one considers the application point of view of my work, whose barycentre is increasingly located around collaborative and assistive robotics, i.e. centred on the human.
|
My contributions in this field are on the one hand related to the generic formulation and reactive resolution of control problems involving several potentially conflicting tasks to be performed concomitantly, optimally and within a set of strict constraints. On the other hand, I also have many contributions in the field of humanoid robot whole-body control where one has to consider the impact of control decisions (e.g. “lift a foot”) on a time horizon. Moreover, in the context of collaborative robotics, I exploit my control paradigm to take into account safety constraints related to the physical interaction and the sharing of the human/robot workspace. Finally, I exploit work on the control of humanoid robots for the simulation of virtual humans in order to perform quantitative, dynamic and detailed ergonomic evaluations.
All these contributions are essentially methodological but have also led me to conduct important experimental developments around several robots but also human motion capture. These developments are evoked in the first person but they are often the result of a collaborative work with my colleagues: permanent staff, engineers, trainees, PhD students and post-docs.
Formulation and resolution of multi-tasks control problems under constraints
 |
In a dynamic environment, the guarantee of compliance with the constraints, being them intrinsic to the robot (joint limits, actuator saturation) or external (no contact with the environment), cannot be provided a priori. This implies that the execution of the tasks to be performed is not guaranteed either, especially if these tasks are defined in reaction to the dynamics of the environment. My contribution in this area has been to contribute to the systematic writing of the reactive control problem as a quadratic optimization problem under linear constraints. This allows, in contrast with approaches classically described in the robotics literature, to guarantee the instantaneous optimality of the control action as well as the strict respect of the constraints at each moment.
|
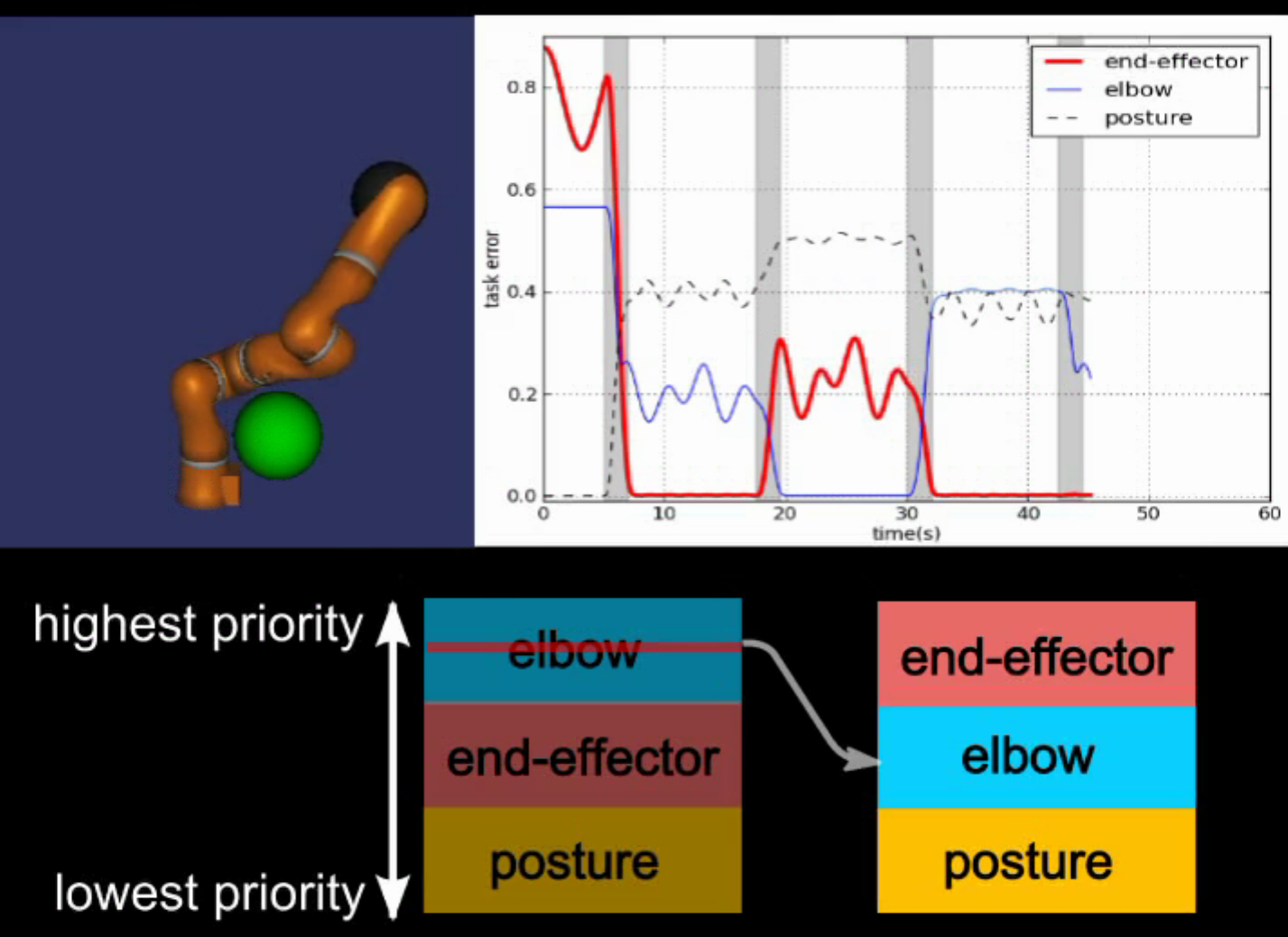
In this framework, I have also proposed a modular hierarchical formulation for n task problems [Liu 2016][Liu 2016]. It allows to express strict and weighted task hierarchies in a unified way and to switch seamlessly from one to the other, providing a simple and efficient way to insert and remove tasks in the control problem. Finally, in parallel with these activities, I conduct an original research work on the formulation of constraints in order to formally ensure the existence of a solution to the control problem over an infinite time horizon (viability) in contexts where the operational instruction is not known in advance. This question of viability is at the heart of the problem of robot control evolving in dynamic environments, especially if we go back to the initially formulated question concerning the global optimality of control decisions and their impact on the existence of solutions to the control problem in the short and medium term.
To be updated
On-going projects
 |
2020 – 2024 LiChIELiChIE
Funding BPI France
Coordinator Airbus
|
Past projects
 |
2006 – 2007 Reactive control and whole rover-arm coordination for space robotics, rock coring application
Funding: Nasa Mars Technology Program
Coordinator: Paul Backes, Nasa JPL
|
 |
2006 – 2007 Control architecture, collision detection and efficient distance computation for Asimo
Funding: Honda robotics research program
Coordinator: Oussama Khatib, Stanford University
|
 |
2002 – 2005 Egocentre: Multi-sensor based dynamic sequencing of tasks for the execution of complex mobile robotics missions
Funding: CNRS RobEA program
Coordinator: Philippe Souères, LAAS CNRS
|
|