
You may also be interested in:
Teaching materials (mine and others)
Software contributions
I unfortunately do not code as much as I used to. You can have a look at my GitHub profileGitHub profile, at the public version of my Gitlab repositories at Inriamy Gitlab repositories at Inria and at the Gitlab repositories of the AUCTUS team at InriaGitlab repositories of the AUCTUS team at Inria. Some older projects are also listed here.
 |
Ocra RecipesOcra Recipes – Optimization-based Control for Robotics Applications: Generic implementation in C of a dynamic robotic controller written as a quadratic optimization problem under linear constraints. This software uses notably Eigen and is indirectly derived from a fork of one of the first versions of RobOptim. In 2015, I was at the initiative of this software celogiciel but but mostly carried out a scientific and, at the margin, technical work around the developments. The main developers are Ryan Lober, Antoine HoarauRyan Lober, Antoine Hoarau and Jorhabib Eljaik.This software was initially used within my team in the context of research in collaborative robotics and of humanoid robots (iCub within the European project CoDyCo). This project was followed by https:github.comsyrocoorcahttps:github.comsyrocoorca a more generic version developed by Antoine Hoarau.
|
 |
Kuka LWR4+ ISIRKuka LWR4+ ISIR: Code set developed in C mainly for the implementation of Kuka LWR 4+/IIWArobots. This set is based on the use of the middleware OROCOS and its associated real-time toolkit (RTT). It includes: a component for integration with ROS, a dynamic simulation component based on Gazebo, a component for the integration of an embedded control architecture, an LQP control component, a 6-axis load sensor management component and many other functionalities. In 2014, I was at the initiative of this software but mostly carried out a scientific and, at the margin, technical work around the developments. The main developers are Antoine HoarauAntoine Hoarau and Jimmy Da Silva. This software was initially used within my team in the context of research in collaborative robotics. It is now also used in several robotics labs.
|
 |
WDLSWDLS – Weighted Damped Least Squares Inverse Velocity Kinematics: Generic generalized inverse solver for solving inverse kinematics problems developed in C within the KDLKDL project of OROCOSOROCOS. I initially developed this inversion method during my PhD thesis and then integrated in 2008 in KDL at the request of Ruben Smits, main developer of KDL. The code maintenance is still active but I am no longer involved in it. This solver is integrated by default via KDL in ROSROS. It is also available in FreeCADFreeCAD, an open-source CAD/CAM software.
|
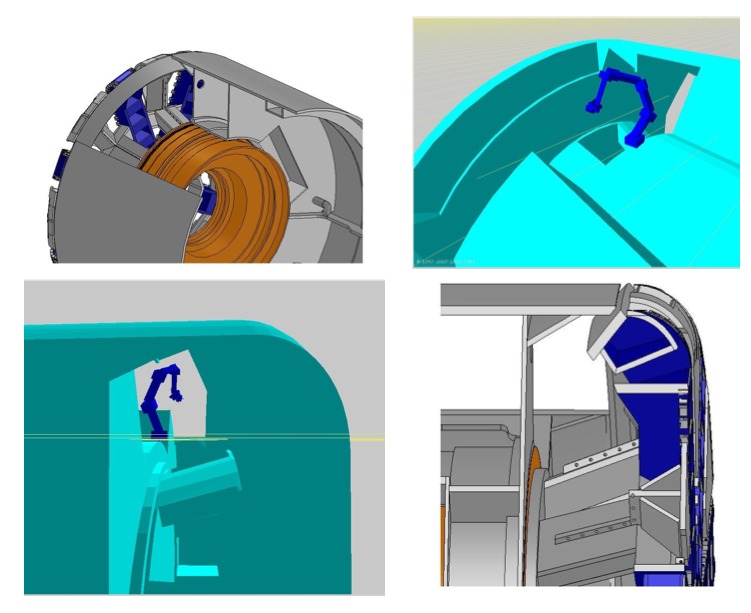 |
nAGEval – new Genetic Algorithm for the Evaluation of Robots: Software allowing the optimization of robot topology and morphology for the realization of tasks in a given environment. This software uses the NSGA2 algorithm implemented in SFERES2SFERES2 as an evolutionary optimization engine. It integrates a serial robot kinematic simulator for which CoDRoS is used as a distance and auto-collision calculation engine. I developed this software together with Sébastien Rubrecht in 2008 and it was used for the design of robots dedicated to the maintenance of tunnel boring machine in the ANR Telemach projectANR Telemach project. This software has been transferred to CybernetixCybernetix for tests within the framework of the project. This software is no longer developed but the sources are available upon request.
|
 |
CoDRoS – Collision Detection for Robotic Systems: C++ distance and auto-collision calculation library for tree structure robots including a parser of standard XML robot description files (precursor of URDF) and using SWIFT as default distance calculation engine. I initially developed this software in 2006 as a postdoc in Ousama Khatib's research team for real-time collision detection and distance calculation for ASIMO (humanoid) and PUMA (6-axis manipulator) robots. I then used it at ISIR in the ANR Telemach projectANR Telemach project and in Sébastien Rubrecht's thesis. This software is no longer developed but the sources are available upon request.
|
|